近日,beat365正版唯一官方网站陈杨杨教授团队联合英国帝国理工学院Kaiwen Chen博士与Alessandro Astolfi教授,在控制领域国际顶级期刊IEEE Transactions on Automatic Control上以长文(Full Paper)形式,在线发表了关于“不确定时变外系统影响下分层自适应编队跟踪控制”的最新研究成果。本研究由beat365正版唯一官方网站博士刘天润为第一作者,陈杨杨教授为通信作者,并得到了国家自然科学基金等项目的资助。
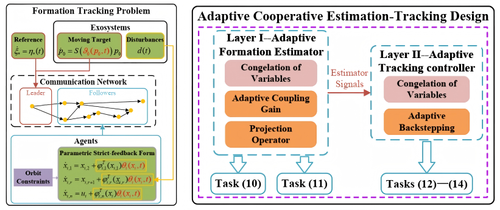
图1 控制问题与分层自适应框架
在水下探测、卫星导航等日益互联的现代应用场景中,多智能体系统的编队跟踪控制发挥着至关重要的作用。然而,在复杂的实际环境中,描述参考目标和系统外部扰动的外系统往往包含未知的时变参数。针对一般有向图通信拓扑下的复杂编队跟踪难题,本研究巧妙引入了变量凝结方法,提出了一套全新的“估计器-控制器”分层自适应控制框架。
本研究通过严密的理论证明了闭环自适应系统状态的有界性与收敛性,并通过仿真验证了所提架构的有效性。该成果不仅为处理带有复杂时变不确定性的高阶非线性多智能体系统提供了坚实的理论支撑,也为无人系统的安全协同控制开辟了新思路。
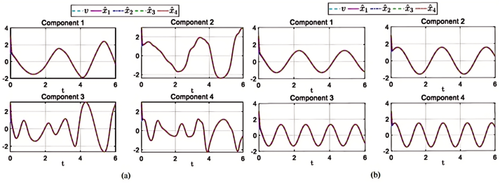
图2 估计性能:(a)时变参数情况;(b)时不变参数情况
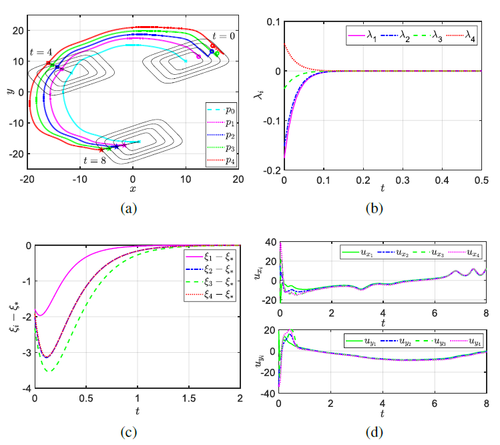
图3编队跟踪性能:
(a)智能体和目标的轨迹;(b)轨道跟踪误差的响应曲线;(c)编队误差的响应曲线;(d)控制信号的响应曲线
论文链接:https://ieeexplore.ieee.org/document/11417890

